
机器人拾取放置解决方案
由机械手代替人工完成高精度的电子装配,并保证高效,不间歇的生产。
产品描述
由机械手代替人工完成高精度的电子装配,并保证高效,不间歇的生产。适用于单目标或Tray盘,专门为各种不同类型机械手执行组装及引导需求设计,可以适应Yamaha、Epson、三菱、Denso、ABB等多种机械手品牌,针对于不同精度可以提供定制化组件产品,通常单相机定位系统适用于一般精度要求的视觉解决方案, 多相机定位系统适用于高精度装配要求的视觉系统解决方案。
产品特性
-
-
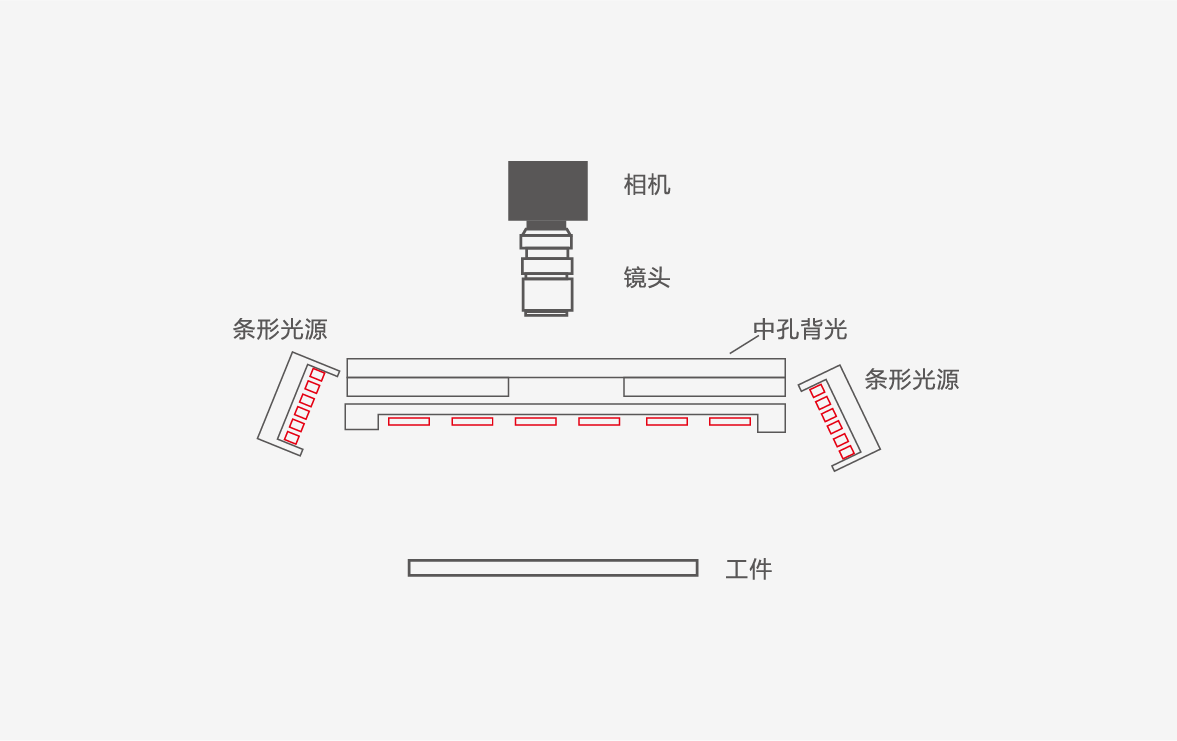
高角度条光设计
四周高角度条光设计,可以有效的使视野内光源均匀分布,另外整体简洁,不影响FFU风路,可以协助压制浮尘。
-

-
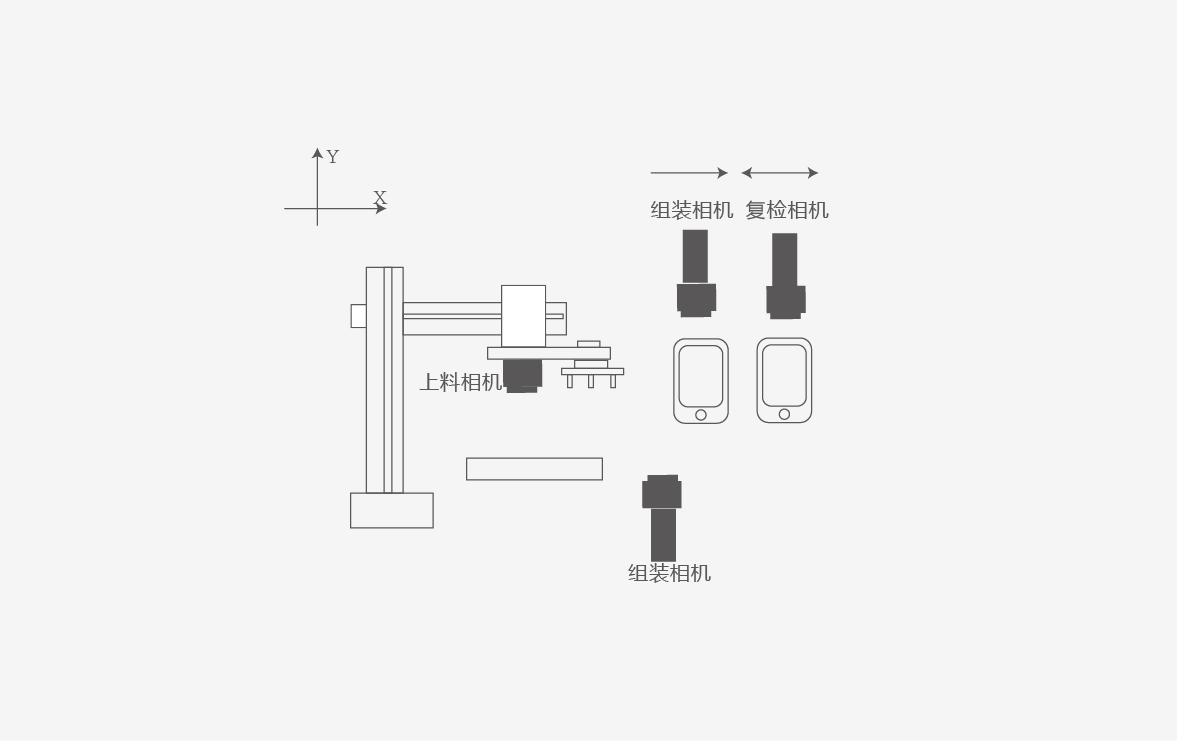
飞拍上料
高亮条光的引入可以兼容皮带飞拍上料,曝光时间<50μs,皮带速度500mm/s,不停拍照,不停取放。
-
-
高精度
异形屏幕定位算法,可以高精度定位屏幕位置。
-
-
适应曲面屏
防眩光光源设计,可以适应曲面屏等定位抓取。
-
-
适应性强
3D技术中可以适应任意高度物料的定位拾取码放等。
-

-
预判
拾取前的物料破损,重叠,折弯检测等,可以为抓取做预判。
相关产品
-
-
-
机器人装配引导解决方案
为适应“设备小型化”和“柔性化”的产线升级需求,利用“视觉求精”和“UVW短行程高精控制”技术完成对原有大行程位移控制系统的替代。
-
-
-

-
激光精密焊接视觉解决方案
为适应“轻薄化”的产品设计趋势,一些较为特殊、精密的扁平零部件的装配已从原有传统的“点胶”“紧固件固定”等方式转变为“激光焊接”的方式。
-
-
-
-
手机外观解决方案
围绕产品出厂对于外观品质要求而打造的一套多方位视觉检测系统,是产品在装配完成后的一道“屏障”,对在装配环节中引入的各类型“划伤、异物、脏污、装配间隙”等外观类不良进行全面检查,保障出货品质 。
-
-
-
-
Gap精密测量解决方案
随着3C产品越来越紧凑,外观要求越来越高,特别是苹果掀起的对产品外观的超高品质要求,因此对电子产品成品以及不同模组组装之间的间隙和段差的提出更高的尺寸控制要求。
-
-
-

-
全自动螺孔缺陷异物检测设备
CNC金属加工过程中的螺纹孔内部缺陷和异物的检测,使用自研的360°成像系统,达到全面检测的目标。
-







